Function
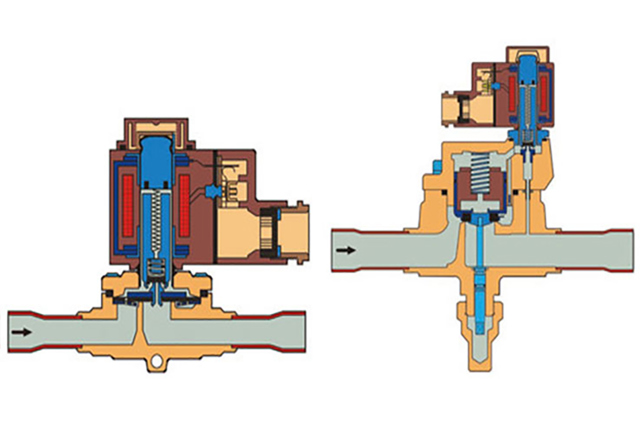
To be able to dimension a solenoid valve correctly and to know what to keep an eye on as you do so, we will now first of all take a look at the set-up of these refrigeration components. Generally speaking a solenoid valve consists of a coil and a valve housing. The coil is mounted on an armature tube. With smaller, directly-controlled valves, the movable armature opens and closes the valve by directly releasing or closing the valve seat. To achieve a better internal seal, that part of the armature that contacts with the valve seat must be given a Teflon seal disk. With servo-controlled solenoid valves the armature movement happens the same way, but in this case a servo bore hole is opened or closed, instead of the entire valve seat. In the case of servo valves with a diaphragm, this results in a movement of the diaphragm over the differential pressures on the valve, which then corresponds with the valve's opening and closing process. The principle is the same with servo solenoid valves with pistons and without a diaphragm. The valve is also opened and closed via the servo bore hole here - but using the piston mechanism, and not with a diaphragm. A rough classification according to capacity values is easily possible. The solenoid valves with the smallest capacity values are therefore mostly directly controlled. With bigger systems, there are also valves that are all fitted with diaphragms and servo-controlled. Ultimately with high capacities you will find servo-controlled piston valves. If these values are no also longer sufficient, then main valves can easily be turned into solenoid valves by means of a solenoid valve attachment. These combinations then leave practically no requirements unfulfilled with regard to the size of the system. If you open a solenoid valve and find neither a diaphragm nor a piston in it, then it will generally be a directly controlled valve. This will then have smaller connections, such as 6, 8 or 10 mm.
Minimum pressure difference
Why is it important at all to know if you are dealing with a directly-controlled or a servo-controlled solenoid valve? This point is actually critically important for dimensioning valves. Directly-controlled solenoid valves do not require any minimum pressure drop for operation. These valves therefore have an extremely good partial load capacity, which allows a moderate pressure drop to be configured. The same dimensioning criteria as with directly-controlled valves also apply to assisted servo-controlled valves. There is no minimum pressure drop that has to be taken into account here either. With servo-controlled valves on the other hand, in addition to the maximum pressure drop, the minimum partial load case must also be considered. With a minimal partial load, the pressure difference must not be allowed to fall below the minimum value that the valve requires in order to be able to work reliably.
This minimum pressure difference of the valve is shown in the relevant technical datasheets. Example: The "EVR 10" has a required minimum pressure drop of 0.05 bar. With 20 kW cooling capacity, R134a and 10°C evaporation, i.e. normal cooling, and an installation in the liquid line, the "EVR 10" would be not be a bad first choice, because 0.06 bar pressure drop in full load is above 0.05 bar, and therefore fine. If now, however, two same size 10 kW compressors are activated in the system on this cooling circuit, only one compressor then falls below the minimum pressure drop when in operation. Mathematically there would then be a pressure drop of only 0.02 bar. The smaller valve should therefore be preferred in this case.
With "EVR 6" the valve's minimum pressure drop is also 0.05 bar, the full load pressure drop is 0.36 bar, and the partial load pressure drop is 0.09 bar. Both values are greater than 0.05 bar. The valve therefore works in every likely operating state. The valve capacity value is therefore determined. A solenoid valve value generally offers the option of selecting different pipe connection widths to minimize the use of reducing sleeves. The sample valve is therefore available with connections for 3/8” or 10 mm and 1/2” 12 mm copper pipe.