
I drives sono più che semplici dispositivi di potenza
Grazie alla capacità di agire come sensori e hub di sensori, di elaborare, memorizzare e analizzare i dati e alle capacità di connettività, i drives sono elementi essenziali nei moderni impianti di automazione e nei sistemi di gestione di edifici (BMS). La funzionalità integrata di monitoraggio predittivo consente nuove modalità di esecuzione della manutenzione, come la manutenzione predittiva.

Monitoraggio dell'acqua e delle acque reflue
Nelle applicazioni idriche e di trattamento delle acque reflue, l'implementazione di un sistema di monitoraggio delle condizioni, integrato nei drives, ottimizza le prestazioni complessive.
E con l'edge computing, non è necessario connettersi al cloud.
Scopri di più sul CBM nel settore acqua
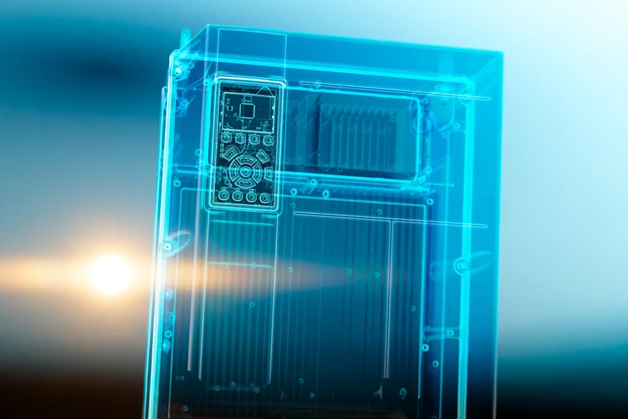
Intelligenza integrata
Cos'è un inverter intelligente?
Nella rete dell'Industria 4.0, l'inverter svolge un ruolo importante ed è caratterizzato da alcune funzioni caratteristiche:
- Connettività sicura: il convertitore di frequenza può essere collegato ad altri elementi in modo sicuro. Altri elementi della rete possono includere inverter, PLC, sensori e un cloud.
- Il convertitore di frequenza agisce da sensore: i drives utilizzano l'analisi della corrente motore e della tensione motore per rilevare le prestazioni del motore e dell'applicazione.
- Il convertitore di frequenza agisce da hub per i sensori: il convertitore di frequenza acquisisce dati da sensori esterni relativi al processo controllato dal convertitore stesso.
- Il convertitore di frequenza agisce da controllore: il drive può sostituire il PLC quando le limitazioni dell'applicazione lo consentono.
- Porta il concept del tuo dispositivo: connettività wireless con dispositivi intelligenti (smartphone, tablet).
Le informazioni provenienti dall'inverter possono essere identificate come segue:
- Segnali istantanei: segnali misurati direttamente dal drive utilizzando sensori integrati. Dati come la corrente motore, la tensione, la temperatura del drive e le loro derivate, ovvero la potenza come moltiplicazione della corrente e della tensione, o la coppia motore. Inoltre, il drive può essere utilizzato come hub per collegare sensori esterni che forniscono segnali istantanei.
- Segnali elaborati: segnali derivati dai segnali istantanei. Ad esempio, la distribuzione statistica (valori massimi, minimi, media e deviazione standard), l'analisi del dominio di frequenza o gli indicatori del profilo di missione.
- Segnali analitici: segnali che forniscono indicazioni sulle condizioni del drive, del motore e dell'applicazione. I segnali vengono utilizzati per attivare la manutenzione o per migliorare la progettazione del sistema.
Le tecniche di analisi della corrente motore permettono al drive di monitorare le condizioni del motore e dell'applicazione. La tecnica consente potenzialmente di eliminare i sensori fisici o di estrarre le prime segnalazioni di guasto che non sarebbe stato possibile rilevare. Ad esempio, l'utilizzo di questa tecnica consente di rilevare in anticipo i guasti di cavitazione e di avvolgimento o l'eccentricità del carico meccanico.
Il concetto del drive come hub per i sensori prevede il collegamento di sensori esterni al convertitore, evitando così la necessità di un gateway per collegare il sensore fisico alla rete di dati.
I sensori di vibrazione, di pressione e di temperatura sono esempi di sensori che possono essere collegati al convertitore di frequenza.
Il vantaggio di questo concetto non è solo legato al costo, ma anche alla possibilità di correlare i dati del sensore con diversi tipi di dati presenti nel convertitore di frequenza. Un esempio ovvio è la correlazione tra il livello di vibrazione di un sensore esterno e la velocità del motore, poiché la vibrazione dipende dalla velocità.
Il CBM in 3 step
Prodotti in evidenza
Prodotti Danfoss che utilizzano il monitoraggio predittivo

Il VLT® HVAC Drive FC102 è l'inverter resistente e intelligente che migliora le applicazioni su pompe e ventilatori nei sistemi di gestione di edifici, e funziona outdoor in quasi tutte le condizioni climatiche.

Il VLT® AQUA Drive FC 202 controlla tutti i tipi di pompe ed è dotato di un controllore in cascata.

VLT® Refrigeration Drive FC 103 è l'inverter dedicato al controllo di compressori, pompe e ventilatori. Assicura notevoli risparmi energetici negli impianti di refrigerazione.

Il VLT® AutomationDrive FC 301/FC 302 è progettato per il controllo a velocità variabile di tutti i motori asincroni e motori a magneti permanenti. È disponibile in una versione standard (FC 301) e in una versione avanzata altamente dinamica (FC 302) con funzionalità supplementari.

Drive configurato e assemblato per soddisfare le tue esigenze nel controllo di uno o più motori.

Un convertitore di frequenza per applicazioni decentralizzate indoor e outdoor che resiste a elevati livelli di pressione e vibrazione, acqua, calore e sporco.

Il convertitore di frequenza VACON® 100 FLOW integra di serie funzionalità che migliorano il controllo del flusso e permettono di risparmiare energia nelle applicazioni industriali con pompe e ventilatori.

Inverter stand alone e inverter in quadro facilmente integrabili in tutti i principali sistemi di controllo.

Massimizza la produzione di energia nelle soluzioni ibride e contribuisce a migliorare le prestazioni avvicinando il supporto di energia al consumo.
Le prime innovazioni di Danfoss
Il CBM nasce da una lunga storia di innovazioni Danfoss. I drives Danfoss si distinguono dagli altri presenti sul mercato per le funzioni intelligenti integrate, che riducono la necessità di componenti esterni necessari.
Maggiori informazioni sui convertitori Danfoss
Esplora le opportunità CBM
Esplora tutte le opportunità sulla manutenzione predittiva

Il monitoraggio delle prestazioni del motore con il CBM, fornisce un modo semplice ed economico per ottenere dati utili sulle tue macchine e prendere decisioni intelligenti sulla manutenzione.

La manutenzione predittiva è un potente strumento per ottimizzare le prestazioni delle macchine, aumentare i tempi di attività e ridurre i costi di manutenzione.

Il monitoraggio da remoto o "remote monitoring" consente agli utenti di accedere ai dati in tempo reale, reagire tempestivamente per evitare interruzioni, ottimizzare le prestazioni e prendere le giuste decisioni.

Oltre al monitoraggio dell'avvolgimento dello statore e della curva di carico, la funzionalità CBM integrata nei drives Danfoss comprende il monitoraggio delle vibrazioni.

L'intasamento all'interno delle pompe causano problemi in termini di maggiori consumi energetici oltre che possibili fermi macchina imprevisti.

Evita costosi guasti alle pompe con la manutenzione predittiva integrata nei drives Danfoss.

Proteggi il motore e aumenta la produttività con il rilevamento preventivo del degrado dei condensatori nei filtri sinus, funzionalità integrata nei drives Danfoss.
Titolo
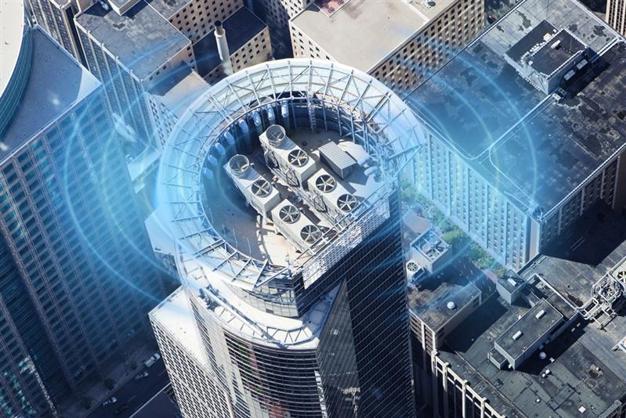
Nelle applicazioni di condizionamento aria e refrigerazione, la funzionalità Condition-based monitoring (CBM), integrata nei drives Danfoss, migliora i tempi di attività e la competitività del sistema prevenendo i problemi prima che si verifichino.

Nelle applicazioni idriche e di trattamento delle acque reflue, l'attivazione di un sistema di manutenzione predittiva, integrata nei drives Danfoss, ottimizza le prestazioni complessive. L'edge computing elimina la necessità di connettersi al cloud..
Casi di studio

Il sistema di refrigerazione preserva la qualità delle mele grazie ai drives con Condition-based monitoring e servizio DrivePro® Remote Monitoring
ITALIA: Il Gruppo Rivoira, garantisce una conservazione perfetta della frutta grazie a un sistema di refrigerazione assolutamente affidabile, senza fermi macchina imprevisti.
Ascolta le interviste dei protagonisti

Ottimizzazione dei tempi di attività nella produzione farmaceutica asettica
DANIMARCA: Azienda farmaceutica determinata a trovare una soluzione HVAC intelligente per prevenire i tempi di inattività, con monitoraggio del sistema in tempo reale e allarmi istantanei personalizzabili.
Inoltre, la soluzione doveva adattarsi all'ambiziosa strategia di digitalizzazione dell'organizzazione.
La soluzione: Danfoss VLT® HVAC Drive FC 102 con Condition-based monitoring.
Leggi la storia

Brindisi ad un radicale cambiamento nella linea di produzione in HEINEKEN
PAESI BASSI: HEINEKEN sa che per soddisfare la domanda, la sua linea di produzione deve essere sempre a pieno ritmo, con risorse che devono fornire prestazioni costantemente affidabili ed eccellenti.
Nel birrificio Den Bosch, l'ambiente di lavoro complesso, ha posto diverse sfide. La soluzione è stata un aggiornamento della linea di produzuione con inverter dotati del Condition-based monitoring.
Leggi la storia